Shooter Design (and ieee paper dissection)
Page 1 of 1

Shooter Design (and ieee paper dissection)
![]() Admin Sat Jan 14, 2012 10:22 pm
Admin Sat Jan 14, 2012 10:22 pm
First, I'll start with the ieee paper, which can be accessed here. Since most people won't be on a university campus to read it, I'll give a summary:
Basically, what this group did is to make a 1-degree of freedom tennis ball launcher. The system was a sort of underhand catapult: it swung around in part of a circle until it released the ball. A photo is here:
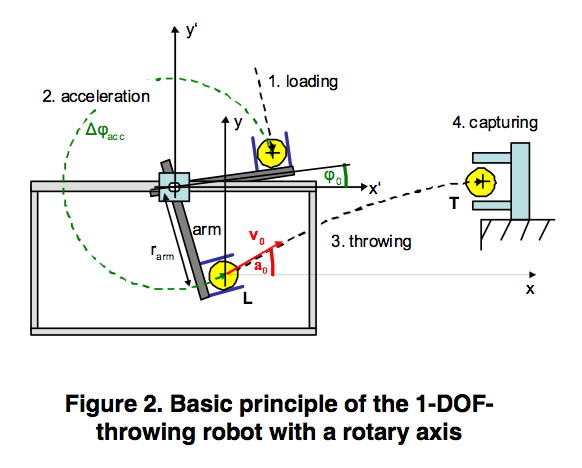
I was actually thinking myself of mocking something like this up. The nice thing about this system is that you can create a quick-release claw to hold the ball and then basically just do a dumb sort of acceleration (with a motor or maybe even a pneumatic) and just release when the speed and angle was correct - basically, it's a bit less prone to errors. However, it's fairly slow in terms of shots per second and their system was only set up for a 100g tennis ball (our ball is 317.5 grams). Additionally, the really big drawback is that it's not turreted, so you lose accuracy in having to physically turn the robot to the correct orientation. Turreting it would potentially make it more accurate, but that might be a tough thing to do.
Here is another picture of it shooting a tennis ball:

Another shooter method is a familiar one to 1504: the multi-roller shooter. Like I said before, they need to be heavy and there's a few other annoyances. Should also be turreted as well.
The third shooter method I discovered reading through the 2006 book was a single-roller shooter that compressed the ball against a curved metal plate to shoot the ball. I'll post more about that a bit later (after I can scan in images from the book), but for now anyone interested can Google some teams' 2006 robots. The Blue Alliance website should have match videos from 2006 - look at shooters from there to possibly get ideas. Keep in mind, though, that shooters then were easier - balls simply had to be fired at top speed at the goal and the goal was bigger and vertical (as opposed to our game, which will require MUCH more finesse).
Basically, what this group did is to make a 1-degree of freedom tennis ball launcher. The system was a sort of underhand catapult: it swung around in part of a circle until it released the ball. A photo is here:
I was actually thinking myself of mocking something like this up. The nice thing about this system is that you can create a quick-release claw to hold the ball and then basically just do a dumb sort of acceleration (with a motor or maybe even a pneumatic) and just release when the speed and angle was correct - basically, it's a bit less prone to errors. However, it's fairly slow in terms of shots per second and their system was only set up for a 100g tennis ball (our ball is 317.5 grams). Additionally, the really big drawback is that it's not turreted, so you lose accuracy in having to physically turn the robot to the correct orientation. Turreting it would potentially make it more accurate, but that might be a tough thing to do.
Here is another picture of it shooting a tennis ball:
Another shooter method is a familiar one to 1504: the multi-roller shooter. Like I said before, they need to be heavy and there's a few other annoyances. Should also be turreted as well.
The third shooter method I discovered reading through the 2006 book was a single-roller shooter that compressed the ball against a curved metal plate to shoot the ball. I'll post more about that a bit later (after I can scan in images from the book), but for now anyone interested can Google some teams' 2006 robots. The Blue Alliance website should have match videos from 2006 - look at shooters from there to possibly get ideas. Keep in mind, though, that shooters then were easier - balls simply had to be fired at top speed at the goal and the goal was bigger and vertical (as opposed to our game, which will require MUCH more finesse).
Admin- Admin
- Posts : 10
Join date : 2012-01-14 -

Page 1 of 1
Permissions in this forum:
You cannot reply to topics in this forum